Недавно приобрел ARDUINO в Китае. Мыслей по изготовление различных устройств- море. Мигать светодиодом на плате очень быстро надоело, захотелось чего то более существенного. Конечно надо бы заказать набор но цена его несколько завышена и пришлось что то искать в интернете, что то придумывать самому. В итоге все равно заказал в том же Китае различные датчики, реле, индикаторы… Немного попозже пришел знаменитый индикатор 1602. С ним поучился работать, тоже довольно быстро освоился. Захотелось поуправлять шаговым двигателем от CD-DVD привода. Ждать с Востока посылку 1-2 месяца не захотелось и я решил попробовать сделать драйвер самостоятельно. Нашел вот такую схему включения биполярного шагового двигателя:
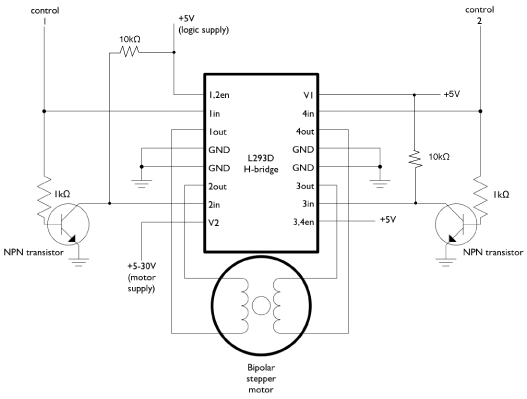
Микросхемы в нашей глуши я не нашел, или заказывать микросхемы в российских интернет-магазинах по стоимости 2-3 готовых драйверов за 1 микросхему. Микросхема представляет собой Н- мост из транзисторов. Кстати включать в мост надо или составные биполярные транзисторы (так называемые сборки Дарлингтона), или полевые транзисторы. Одиночным биполярным транзисторам нужна хорошая раскачка, которую контроллер дать не может, иначе получается очень высокое падение напряжение на транзисторе из за того что он открыться не может. Т.к. хороший товарищ занимается ремонтом компьютеров, то с полевиками проблем не возникло. Сначала хотел сделать на биполярниках- но получается в 2 раза больше транзисторов, что не совсем хорошо для габаритов драйвера, да и ток они выдержат гораздо меньший. Выпаяв около десятка полевых транзисторов и почитав на них даташиты я снова впал в уныние- в интернете есть схемы только на парах полевых транзисторов n- и p- типов. И ниодной схемы на транзисторах одного типа я просто не нашел. В компьютерах же используются транзисторы n- типа. Пришлось мудрить на макетной плате небольшой девайс на полевиках, попробовал управлять светодиодами, получилось и я решил собрать готовое устройство. Драйвер не нуждается в налаживании ибо налаживать здесь практически нечего. Единственная проблема возникла с программным обеспечением. Нашел даташит на похожий двигатель и по графикам работы выставил состояния выходов. После этого осталось только подобрать delay и все- устройство готово! Собственно схема замены микросхемы L293D.
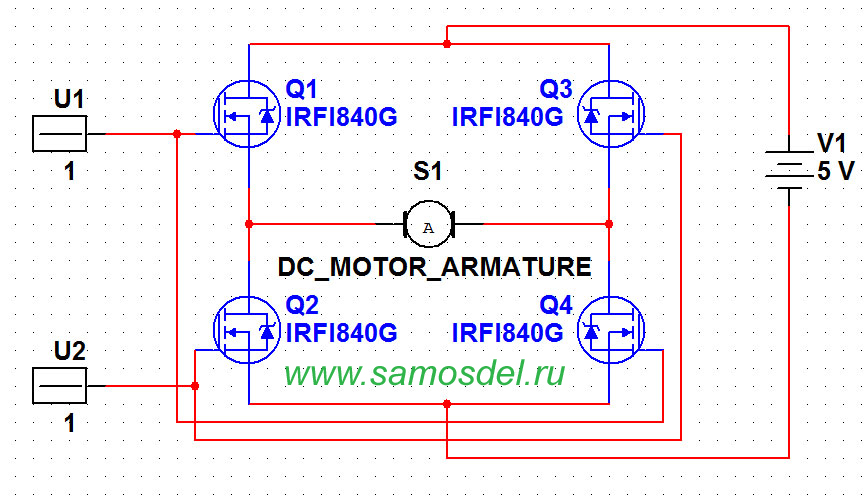
Данные транзисторов даны просто так- в мультисиме никак не смог их изменить. Я использовал транзисторы P60N03LDG в корпусе ТО-252 . В ней все довольно просто: при поступлении напряжения на один из входов U1 или U2 открываются 2 транзистора в верхнем и нижнем плече, причем крест- накрест. Таким образом переключается полярность напряжения на двигателе. А чтобы не подавалось напряжение сразу на 2 входа (это вызовет КЗ цепи питания) и использовал схему включения L293D. При таком включении NPN-транзистор не позволяет открывать сразу все 4 транзистора Н-моста. Кстати 1 двигатель будет управляться по 2 выходам Arduino, что крайне важно для экономии выходов и входов микроконтроллера. Еще условие- минусовой провод транзисторных ключей обязательно должен быть соединен с минусовым выводом платы управления. Питание подается на плату управления от Arduino, на ключи- от внешнего БП. Это позволяет подключить достаточно мощные двигатели. Все зависит от характеристик транзисторов. Итак для одного драйвера вам нужно 8 полевых транзисторов (P60N03LDG или любые другие n-канальные), любые 2 SMD-биполярных транзистора NPN (у меня стоят с маркировкой t04), smd-резисторы типоразмера 0805, и 4 такие же перемычки того же размера (на них написано 000 или просто 0). Все эти детали можно найти на старых и негодных материнских платах. Обязательно проверьте детали перед установкой.
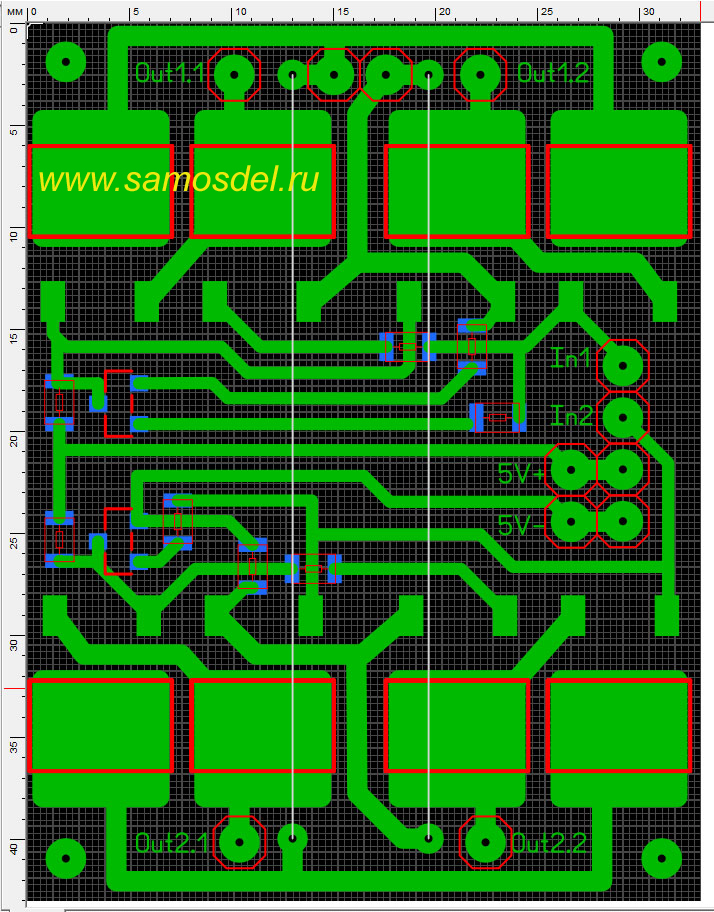
Выкладываю плату в формате Layout6. Плата драйвера скачать. Замечу что у вас должен получится именно такой вид- надписи должны быть читабельными а не перевернутыми, учитывайте это при печати платы, детали ведь будут установлены со стороны дорожек. Разъемы тоже выпаиваем из материнки феном, отрезаем сколько по надо количеству пинов и впаиваем в нашу плату- так гораздо удобнее и надежнее нежели чем паять провода в плату. Разберемся с назначением выводов: выводы Out1 и Out2- подключение обмоток шагового двигателя, In1,2- вход от Arduino, ±5V- питание управления от Arduino (сделал двойной разъем т.к. подключать питание можно шлейфом сразу к нескольким блокам), 2 перемычки располагаются на другой стороне платы, по ним подается напряжение на ключи. Размер платы- 43х33мм. Кто желает- может еще больше минимизировать.
Разберемся с программным обеспечением для шагового двигателя. Для любого шагового двигателя необходимо найти даташит или, на худой конец, диаграмму его работы. Я нашел только диаграмму, она выглядит так:
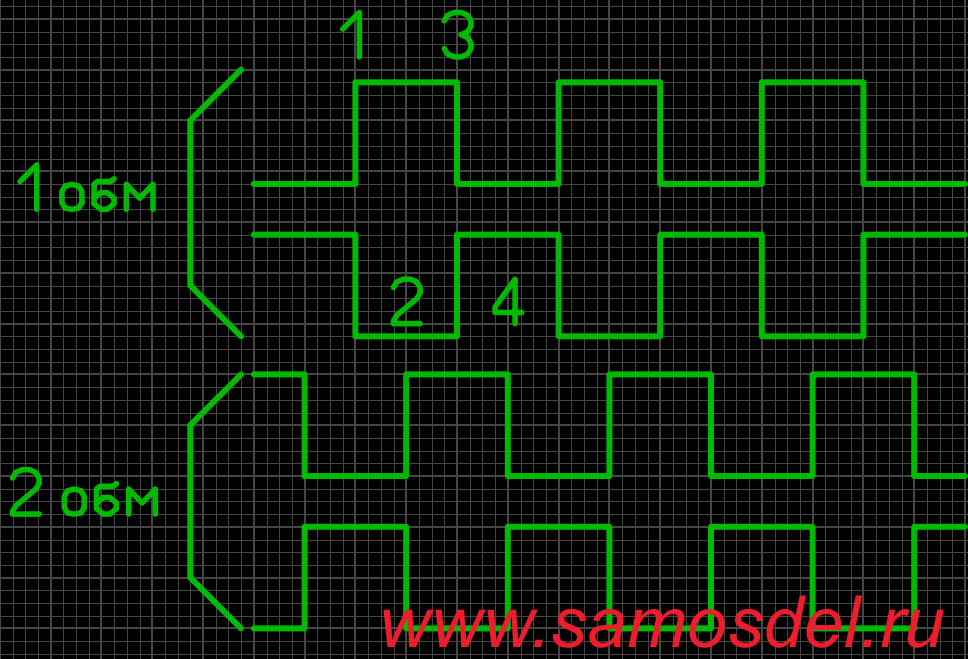
Цифрами указаны номера шагов. Исходя из того что при переключении контроллером высокого уровня на низкий драйвер сам переключит нужные ключи, то пишем, например, состояния только для верхних графиков каждой обмотки. Первый шаг: первая обмотка- первый провод +(HIGH), другой автоматически переключится драйвером на минус (LOW), напоминаю что описываем по первому проводу каждой обмотки. Вторая обмотка: первый провод — (LOW), второй + (HIGH), второй провод переключится драйвером автоматически. Переходим к первому изменению графика. Это 2 шаг. Описываем состояние только первых проводов. 1 провод первой обмотки остался HIGH, 1 провод второй сменился с LOW на HIGH . Третий шаг- 1 провод первой обмотки сменился HIGH на LOW, 1 провод второй остался HIGH. Четвертый шаг: 1 провод первой обмотки остался LOW, 1 провод второй обмотки сменился с HIGH на LOW. Описывать можно с любого шага, главное сохранять последовательность. Чтобы двигатель вращался в другую сторону нужно просто сдвинуть в диаграмме значения любой обмотки на полцикла в любую сторону. Таким образом можно писать программное обеспечение для драйверов. Нужно лишь знать диаграмму и правильно описать ее состояние на выходные пины.
Теперь подключаем плату к Arduino, двигателю. Забрасываем такой скетч:
// подключаемся к 8,9 выводам arduino
int input1 = 8;
int input2 = 9;
int stepCount = 5; //задержка между шагами регулирует скорость двигателя
void setup()
{
pinMode(input1,OUTPUT);
pinMode(input2,OUTPUT);
}
void loop()
{
//1-ый шаг
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
delay(stepCount);
//2-ой шаг
digitalWrite(input1,HIGH);
digitalWrite(input2,HIGH);
delay(stepCount);
//3-ий шаг
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
delay(stepCount);
//4ый шаг
digitalWrite(input1,LOW);
digitalWrite(input2,LOW);
delay(stepCount);
}
Подаем питание на драйвер, меняем, если надо, выводы одной обмотки и думаем куда приспособить данный девайс (можно открывать по времени и температуре форточки в теплице, управлять жалюзи и многое другое). Обращаю внимание что двигатель будет крутиться без остановки по данному скетчу, если надо- загоните в цикл и крутите на требуемое значение или, что еще лучше, напишите библиотеку и подключайте ее напрямую. Конечно это не такой крутой драйвер как на микросхеме, но для экспериментов, пока идут нормальные драйверы из Китая, его более чем достаточно. Всем удачи и успехов в осваивании микроконтроллеров. Подробнее о микроконтроллерах ARDUINO читайте ЗДЕСЬ.